
Powerful tools, completely free
OXTS NAVsuite
Collecting data with an inertial navigation system requires software that allows you to monitor, visualise, and post-process your data. NAVsuite enables you to do all those things, including running powerful post-processing algorithms, for free.
What do you need to do?

Configure your INS
Set your INS up exactly how you want it. Create as many configurations for your INS as you need, or extract a configuration from a previous data collection. A handy visual guide and step-by-step wizard makes sure everything is set up to the right specification. You can also check your device’s firmware and feature codes.

Monitor data in real time
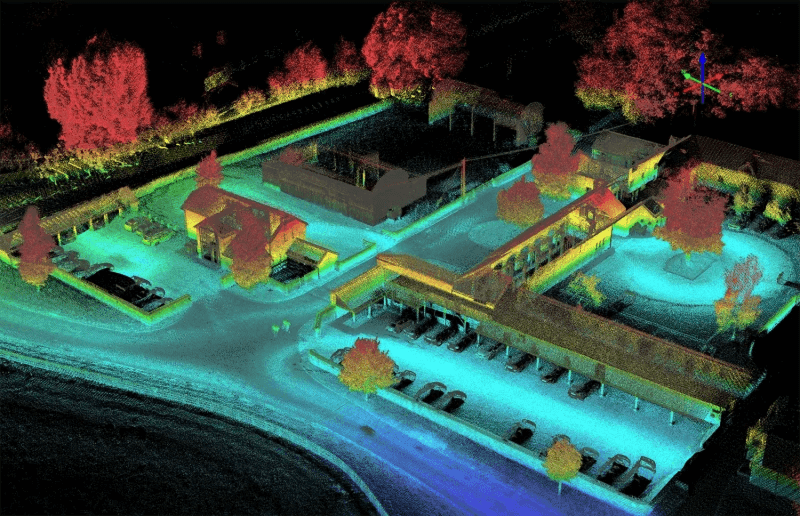
Our unique LiDAR Boost technology takes data from WayFinder’s integrated LiDAR scanner to provide accurate localisation data in challenging environments. LiDAR Boost is a set of advanced algorithms that use data from WayFinder’s integrated LiDAR to compensate for missing or erroneous GNSS updates in real time. It enables high-accuracy localisation in challenging GNSS conditions such as urban canyons, underground environments, or tunnels.
Post process your data
Improve data accuracy by applying differential corrections and our powerful forward/backwards processing and gx/ix algorithms in NAVsolve. You can reprocess data using different configurations to correct errors or test new scenarios.
Plot your data
Your data, on a graph. Export data in a variety of formats including spreadsheets, KML, binary, or images. NAVgraph preserves system performance even when viewing large files and multiple measurements.

Configure your base stations
NAVbase gives you control over your RT-Base S or GPS-base settings, including which type of corrections to receive and how long you want it to average satellite positions to maximise position accuracy.
You can also check the status of each base station, including the number of satellites it can see and each one’s known position.
INERTIAL NAVIGATION SYSTEMS
Achieving the right levels of accuracy in challenging GNSS environments is crucial for many projects OXTS’ proprietary processing algorithms and software help you achieve accuracy levels that rival FOG INS performance, even in urban canyons.
Powerful post processing with NAVsolve
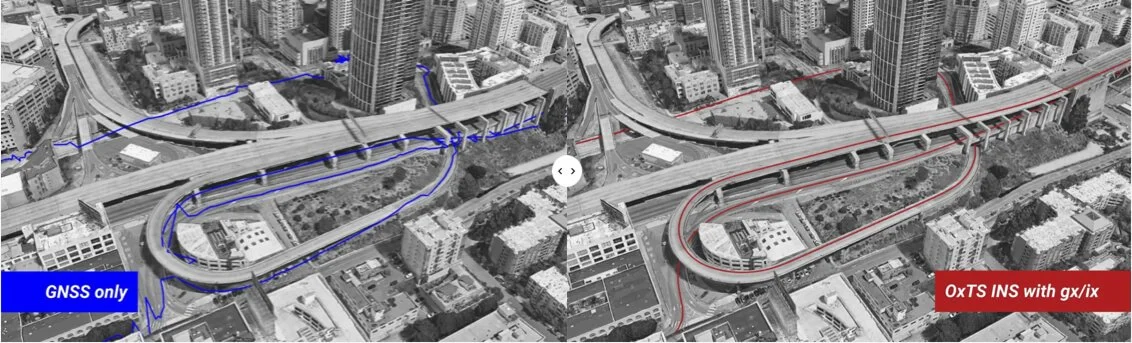
An OXTS INS can integrate single-satellite aiding data into its navigation solution, and reduce the time taken to reacquire RTK lock, in real time. Using NAVSolve, you can reprocess your raw data and still benefit from gx/ix tight-coupling processing.
gx/ixTM tight-coupling processing
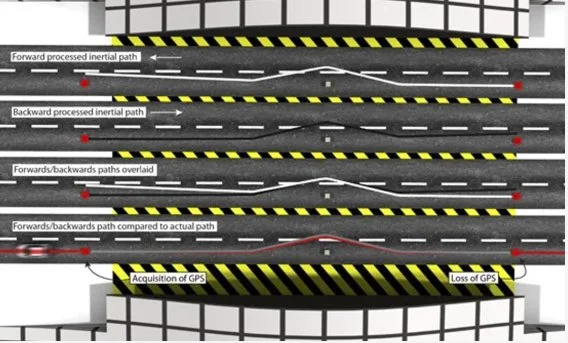
Forwards/backwards processing
In areas where GNSS signal is lost and then reacquired, inertial data can be processed backwards from the reacquisition of signal and combined with the same data processed forwards from the loss of signal to reduce IMU drift.
Need Help? Let’s Talk!
Have questions or need support? Our team is here to assist you. Reach out now!